


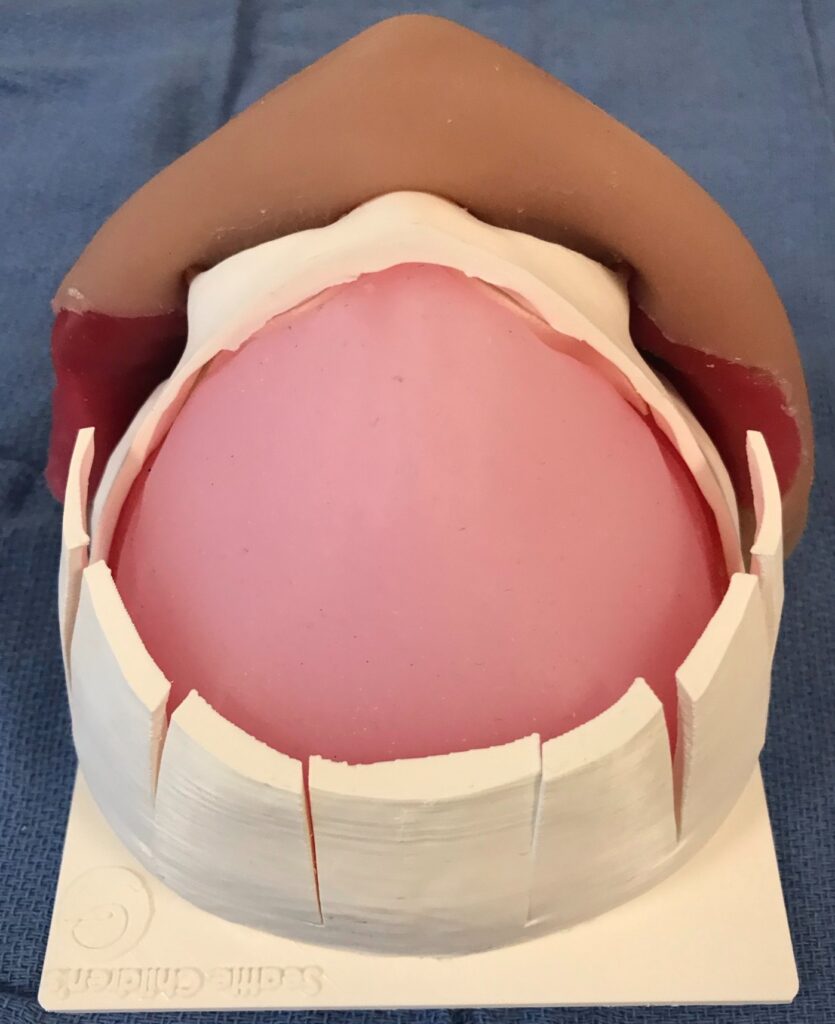


Evaluation of a High-Fidelity Cleft Alveolar Bone Graft Simulator
Dale J. Podolsky, Branavan Yasabala, Karen W. Wong Riff, David M. Fisher. Journal of Plastic, Reconstructive & Aesthetic Surgery, Volume 93, 2024, Pages 269-278, ISSN 1748-6815, https://doi.org/10.1016/j.bjps.2024.04.034.
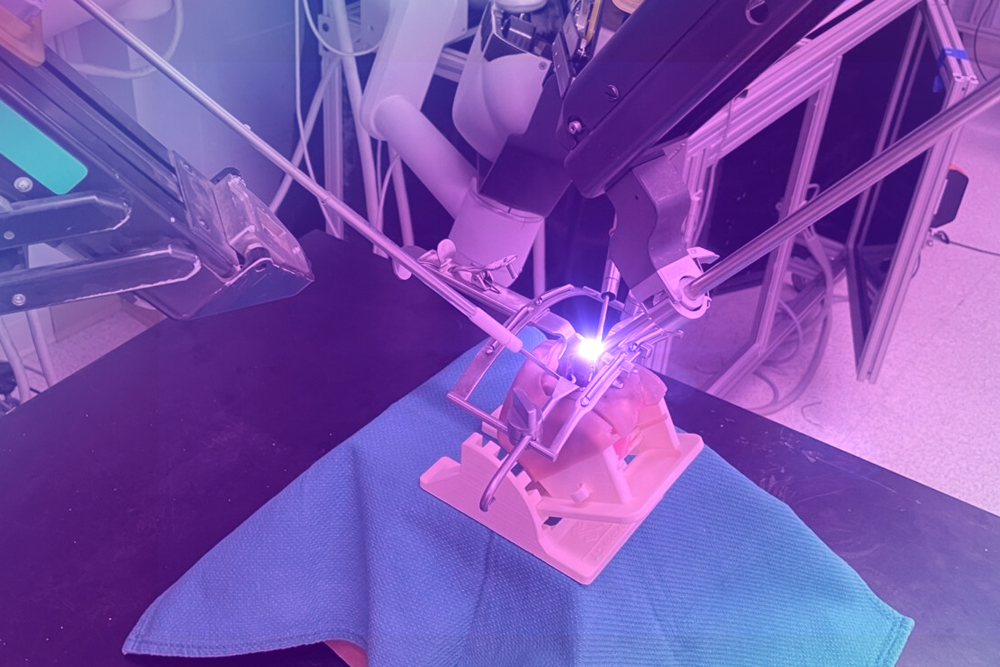
Simulation in Craniosynostosis Surgery
Podolsky, Dale J. MD, PhD; Wong, Clara; Hopper, Richard A. MD, MSc. Simulation in Craniosynostosis Surgery. Plastic and Reconstructive Surgery 153(1):p 220e-222e, January 2024. | DOI: 10.1097/PRS.0000000000010879.
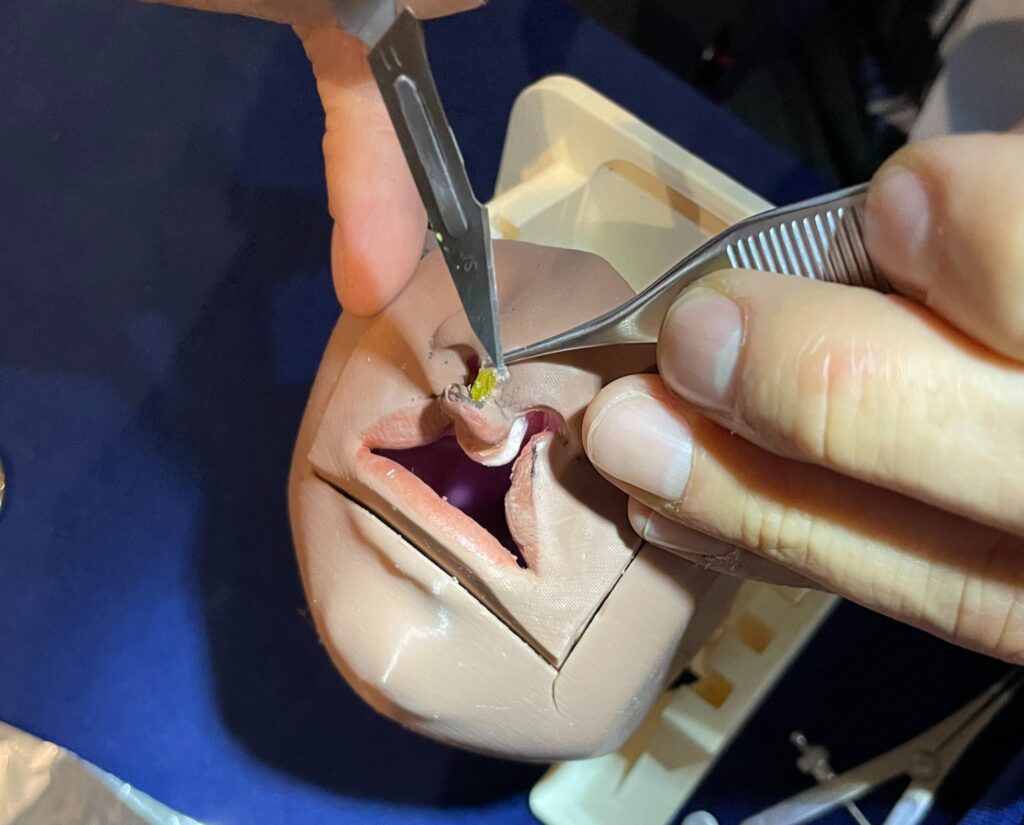
Development and Preliminary Evaluation of A Soft Tissue Microtia Simulator
Lanser, Charlotte; Fisher, David M; Kasrai, Leila; Fisher, Keon; Podolsky, Dale J. The Journal of Craniofacial Surgery 35(6):p 1688-1691, September 2024. | DOI: 10.1097/SCS.0000000000010322
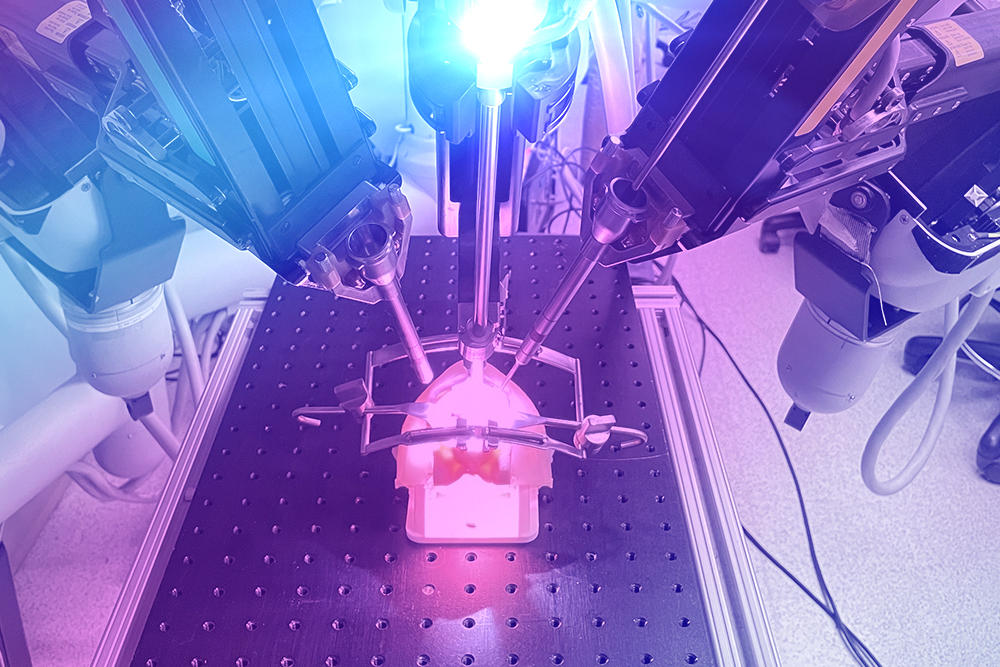
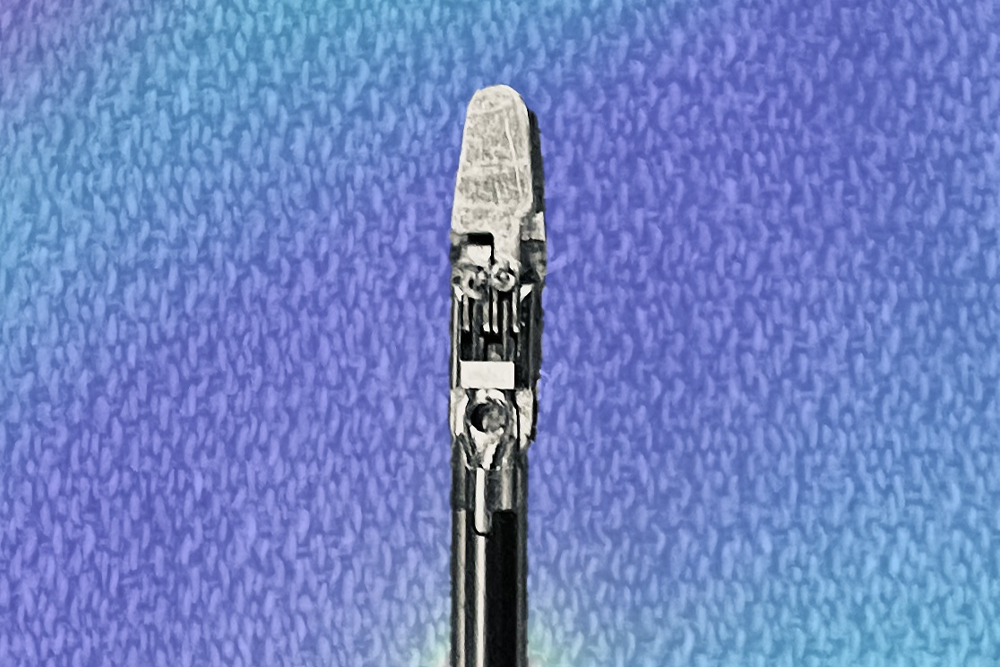
Characterization of Friction within a Novel 3 mm Wristed Robotic Instrument
Caitlin Ho, Thomas Looi, Glenn Maguire, Dale J Podolsky. Actuators 2024, 13(9), 326; https://doi.org/10.3390/act13090326

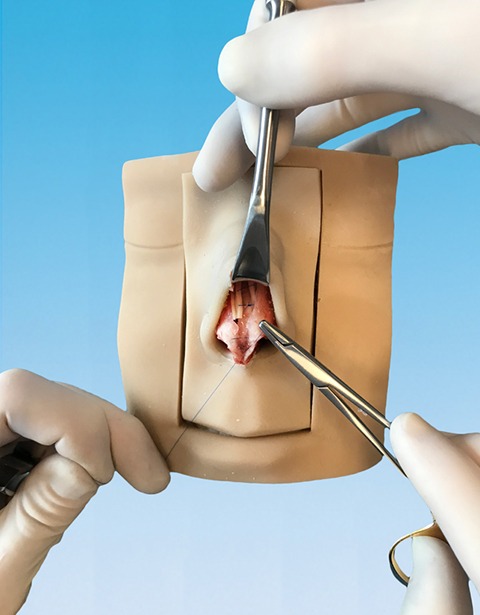
Evaluation and Implementation of a High-Fidelity Cleft Palate Simulator
Dale J. Podolsky, David M. Fisher, Karen W. Wong Riff, Thomas Looi, James M. Drake, Christopher R. Forrest | Plastic and Reconstructive Surgery: January 2017 – Volume 139 – Issue 1

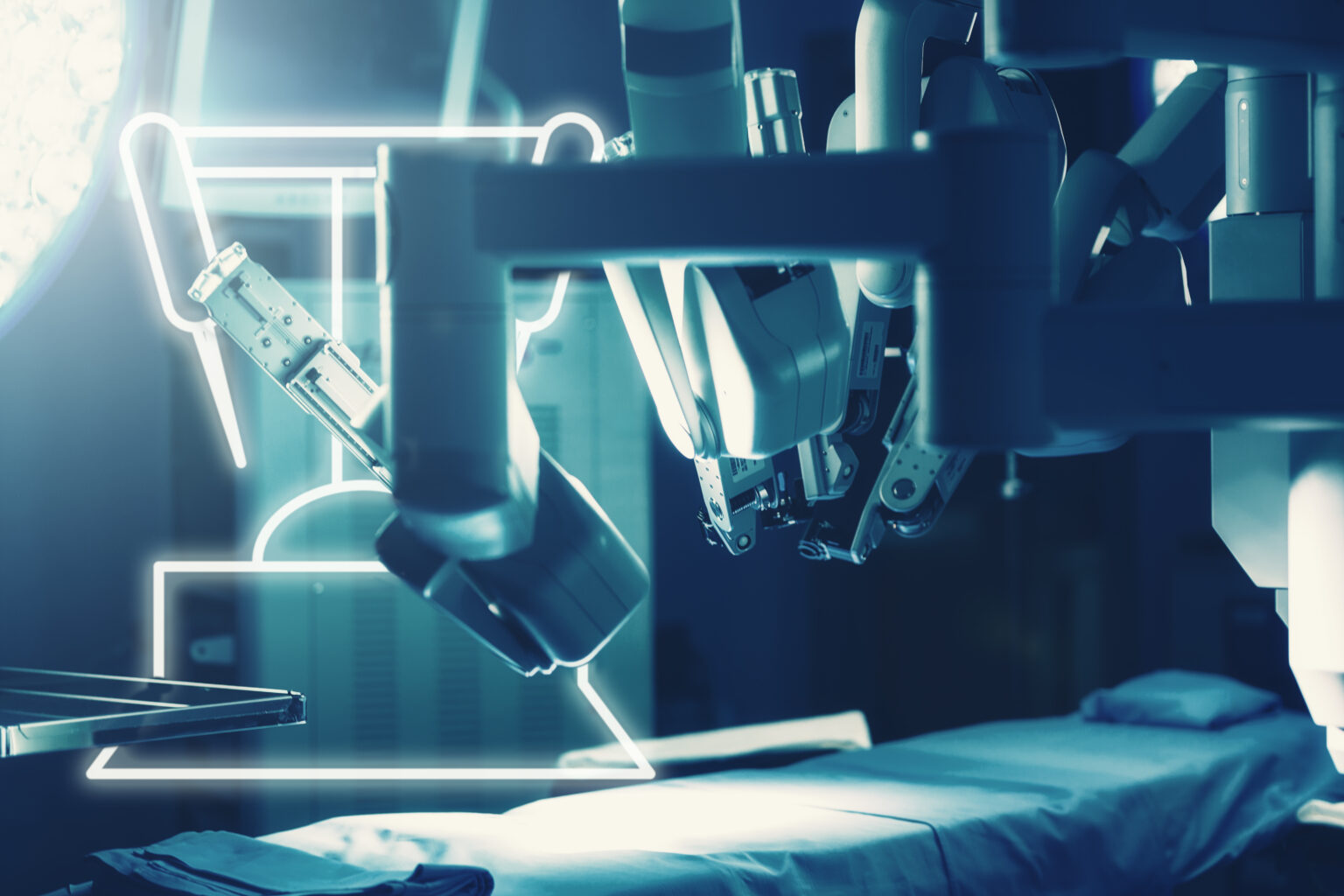
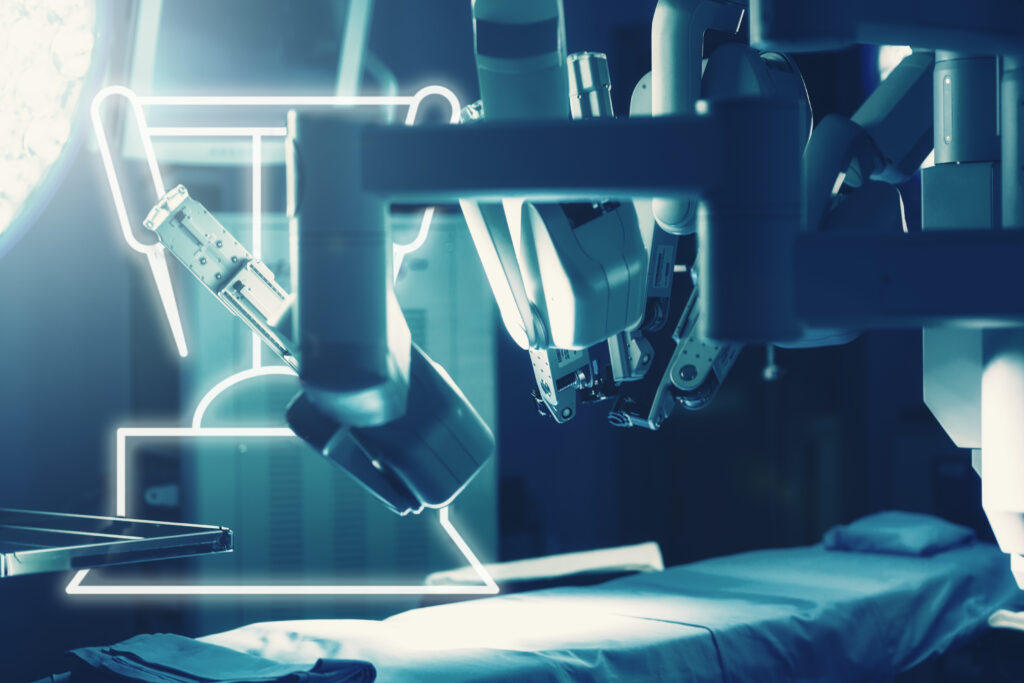
Infant Robotic Cleft Palate Surgery: A Feasibility Assessment Using a Realistic Cleft Palate Simulator
Dale J. Podolsky, David M. Fisher, Karen W. Wong Riff, Thomas Looi, James M. Drake, Christopher R. Forrest | Plastic and Reconstructive Surgery: February 2017 – Volume 139 – Issue 2
Utilization of Cable Guide Channels for Compact Articulation Within a Dexterous Three Degrees-of-Freedom Surgical Wrist Design
Dale J. Podolsky, Eric Diller, David M. Fisher, Karen W. Wong Riff, Thomas Looi, James M. Drake, Christopher R. Forrest | ASME. J. Med. Devices. March 2019